Step 3
Completing the Easier Conditions
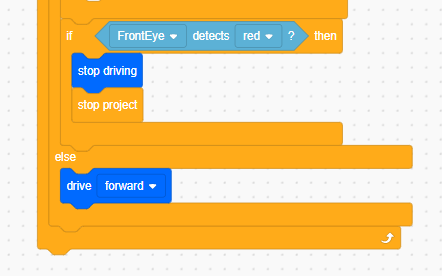
Right off the bat, there are 2 sections of our code are pretty simple.
First, we need our robot to stop when we sense the red disk.
Secondly, we need our robot to move forward if it thinks it’s path is clear. (When the FrontEye is not near an object.)
See if you can figure out the rest of the code before moving on!