Step 2
Analyzing the map
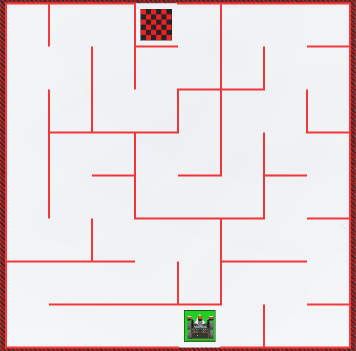
Even though every map is going to be different, there are still a few things we can take away from looking at one of the maps.
One thing we have to keep in mind is that this maze will always be changing, because of this we can’t tell our robot to go a specific way. What worked in one maze, may not work in another. This sounds like a problem that our many different sensors can help to solve.
There are actually a few things that are the common in every map. We can use these to help our robot solve this problem. The first is that every maze has walls, this should be obvious, but it is a very important thing to remember when coding our robot. The other is that the ending is clearly marked in every maze with a red and black pattern on the floor.
Before moving on and starting to code, we need to come up with a plan. When programming, may programmers call these plans “algorithms.” How can we create a program/algorithm to solve this complex problem? We will go over one of many plans/algorithms in the next page; however, see if you can come up with your own before moving on to the next page.