VEX Virtual Robotics – Project 7 – Dynamic Maze
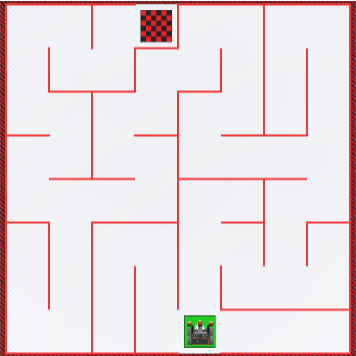
In this project, we will practice using more of our Vex’s sensors to complete the “Dynamic Wall Maze” map. In this map, our goal is to navigate our robot to the end of maze, a task that we’ve done before. However, this maze will change every time we restart the program and we want our robot to still be able to make it through, no matter what the maze looks like.
Course Content
Project 7: Dynamic Maze